-
目前高級輔助駕駛ADAS傳輸數字視頻主要采用以下幾種技術相結合的方式
-
?LVDS (低壓差分信號) 物理層傳輸:?
-
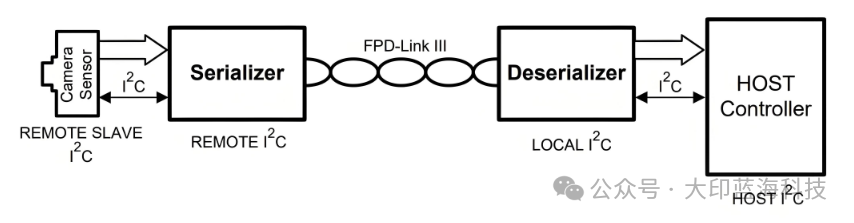
攝像頭模組(尤其是環視、后視等近距離高分辨率攝像頭)與域控制器或處理單元之間,普遍使用專為汽車環境設計的LVDS接口進行原始視頻信號的物理傳輸。
-
LVDS的優點在于抗干擾能力強、功耗低、傳輸速率高,適合在車內復雜的電磁環境下傳輸高速數字視頻信號。
-
-
-
?車載以太網骨干網絡:?
-
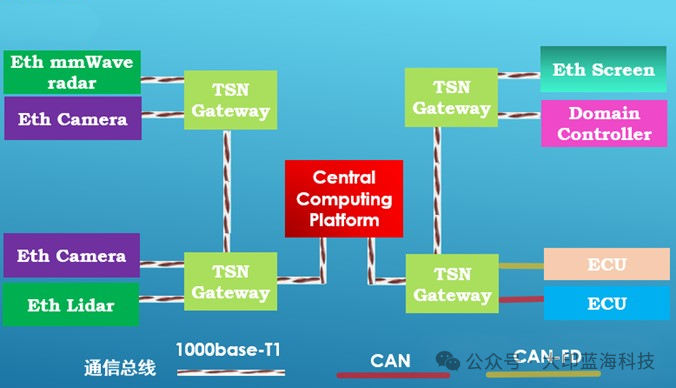
經過初步處理或需要匯總傳輸至[敏感詞]計算平臺(如華為MDC)的視頻數據、感知結果及其他傳感器數據,通過高帶寬的車載以太網進行傳輸。
-
車載以太網提供高吞吐量和低延遲,是實現多傳感器融合(包括多路攝像頭視頻流)以及高速數據傳輸(如到云端)的核心網絡基礎設施。
-
-
-
?云端協同傳輸 (5G/V2X):?
-
對于需要云端處理、模型更新、數據回傳或車路協同(V2X)的場景,視頻數據或處理后的感知信息會通過車載5G通信模塊傳輸到云端。
-
云端的世界模型引擎需要接收車端數據,同時也會下發更新或協同信息。V2X則用于車輛與道路設施(如路側單元RSU)交換視頻或感知信息,增強環境感知能力。
-
-
-
?小結:?
-
?攝像頭到域控/處理單元:? 主要依賴?LVDS?物理接口進行高速、可靠的原始數字視頻信號傳輸。
-
?域控/處理單元到[敏感詞]計算平臺/車內網絡:? 依賴高帶寬?車載以太網?傳輸處理后的視頻流、感知數據及進行多傳感器融合。
-
?車端到云端/路側:? 通過?5G蜂窩網絡?和?V2X(車聯網)? 技術進行數據傳輸,實現云端協同計算、數據閉環、模型更新及車路協同。
因此,ADAS方案是一個結合了?LVDS物理層接口?、?車載以太網骨干網?和?5G/V2X無線通信?的綜合傳輸體系,以滿足不同環節對數字視頻傳輸速率、可靠性和應用場景的需求
關于GMSL/LVDS與車載以太網的替代關系,綜合技術演進和行業動態,核心結論如下:
一、短期內不會被完全取代,形成互補共存?
-
?物理層不可替代性?
GMSL/LVDS通過?單線集成供電+數據傳輸?(PoC技術)、?強抗干擾性?(差分信號+屏蔽設計)及?微秒級低延遲?特性,在攝像頭/激光雷達等傳感器原始數據傳輸場景仍具優勢。
-
例如:高分辨率攝像頭需6Gbps帶寬及抗電磁干擾能力,GMSL仍是主流方案。
-
?車載以太網的局限性?
-
-
協議棧處理引入毫秒級延遲,難以滿足傳感器實時性要求。
二、長期融合趨勢:協議兼容而非直接替代?
-
?GMSL向以太網靠攏?
-
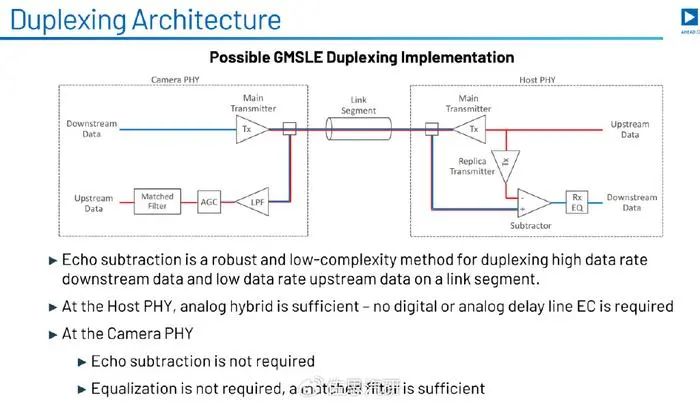
ADI推出?GMSLE?(GMSL Enhanced),將SerDes數據封裝為以太網幀傳輸,實現與車載以太網骨干網無縫對接;
-
-
?OpenGMSL聯盟?(2025年成立)推動GMSL成為開放標準,強化以太網生態整合。
?混合架構成為主流?
三、替代邊界:特定場景逐步遷移?
-
?可能被替代的場景?
-
信息娛樂系統、中控顯示等?非實時性數據?傳輸,逐步轉向車載以太網;
-
IEEE 802.3ch標準支持10Gbps以上帶寬,未來或覆蓋部分視頻傳輸需求。
-
?難以替代的場景?
-
自動駕駛傳感器(激光雷達/8MP攝像頭)的?原始數據流傳輸;
-
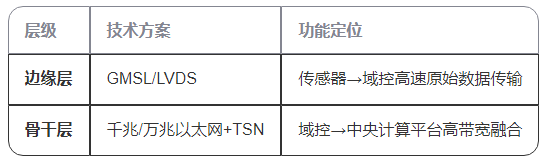
結論:分層協作,長期共存?
-
?2025-2030年?:GMSL/LVDS仍主導傳感器鏈路,車載以太網主導骨干網絡;
-
?2030年后?:GMSL通過?以太網兼容化?(如GMSLE)融入車載網絡,但物理層特性使其在專用傳感領域持續存在;
-
?[敏感詞]替代條件?:需突破以太網物理層抗干擾、供電集成及時延瓶頸,且成本低于現有SerDes方案。
注:技術迭代速度受?芯片成熟度?(如TSN交換機量產進展)及?標準統一性?(OpenGMSL聯盟進展)共同影響。
免責聲明:本文采摘自“大印藍海科技”,本文僅代表作者個人觀點,不代表薩科微及行業觀點,只為轉載與分享,支持保護知識產權,轉載請注明原出處及作者,如有侵權請聯系我們刪除。